AI製品・サービス
Visual SLAM自律運転ソフトウエア「ZIA MOVE」
AI製品・サービス
Visual SLAM自律運転ソフトウエア「ZIA MOVE」
製品概要
ZIA MOVEは、ロボティックビークルの自律運転向けソフトウェアプラットフォームです。
同プラットフォームには、自己位置推定、地図作成・保存、最適なルートの作製(パスプランニング)、パス追従や表示機能までを含んでおり、さらにGUIによるナビゲーション操作が可能です。
ZIA MOVEの特長として、自己位置推定機能にVisual SLAM技術を採用しております。
Visual SLAMとは
自分の現在位置を推定する機能を「自己位置推定機能」と言います。
自己位置推定のためには、周辺の状況を理解する機能や、同じ場所を通行した場合に、環境を記憶したり思い出したりする機能が必要です。
ここで、記憶された周辺の環境を環境地図、または単に地図と呼びます。
自己位置推定と地図作成を同時に行う技術をSimultaneous Localization and Mapping と言い、頭文字をとって、SLAMと呼びます。
SLAMが使用するセンサーには、3D LiDAR、2D LiDARや、深度付きカメラを単独で使用する方法や、これらを複数組み合わせて使用する方法などがあります。
カメラだけをセンサーとして使用するSLAMをVisual SLAMと言います。
特徴
・カメラを使用するので、レーザーやセンサーなどに比べて低価格で、導入コストを抑えられます。
・カメラはSLAM以外の用途にも利用でき、カメラ画像をAI処理することで、物体認識することが可能です。
・ケーブルの様に細くてLiDARでは捉えにくいもの、例えばポール間に渡されたチェーン等を障害物として認識可能です。
・壁の模様など3D LiDARでは見落とす特徴を捉えることが可能です。
・RGBDやステレオカメラは、障害部の幅、奥行きに加え、高さも観測できるため、高低差があるような環境でも、カメラ単体で容易に周辺状況を把握することが可能です。
・高い停止位置精度とマーカー不要な自律走行が可能です。
・SLAMの地図作成には通常専門知識、経験や手間を必要としますが、当社のZIA MOVEは、容易に地図が作成できるように、工夫がされております。
システム構成
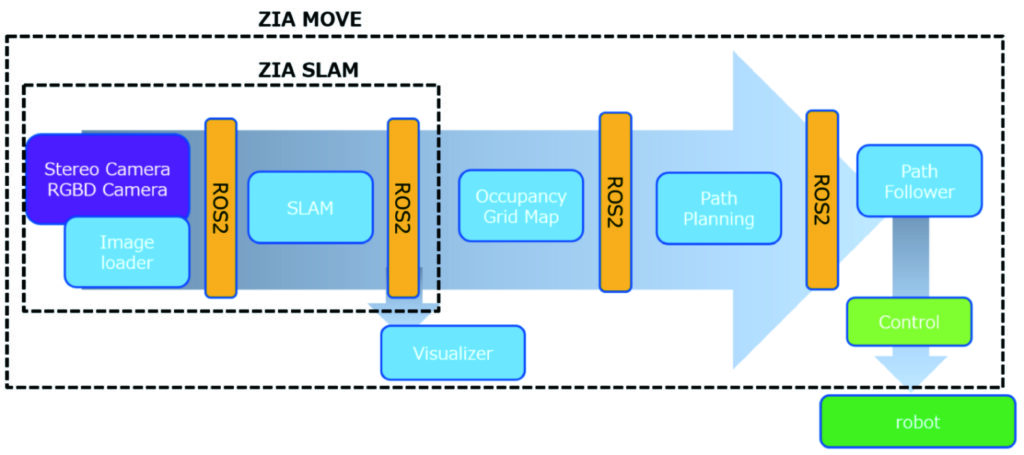
ZIA MOVEはROS2のノードとして実装された複数のモジュールから構成され、それぞれのモジュールは2つの大きなコアに分類されます。
一つは、カメラ画像から自己位置推定と環境地図作製を同時に行う SLAMコア、もう一つは最適なルートの作製(パスプランニング)、パス追従を行うNavigationコアです。
SLAMコアだけを含む製品がZIA SLAM、両方のコアを含む製品が ZIA MOVE です。
また、ZIA MOVEではコントロールプログラムのサンプルも提供しており、ロボットにあわせたコントローラを容易に作成できます。
推奨動作環境
| Item | 推奨環境/動作仕様 | 動作確認済ハードウェア | 備考 |
|---|---|---|---|
| コントローラ | Jetson Orin AGX | コンテック DX-U2200 | コンテック社DX-U2200シリーズはNVIDIA Jetson Orin NXを搭載し、産業用グレードに開発された産業用PCです。ファンレス、厳しい温度環境に対応するように設計されており、高い信頼性が要求される産業用のAMRの組み込みに最適です。 |
| カメラ | RealSense D455 | Intel RealSense D455 ZED 2i | |
| ハードディスク容量 | 1TB以上 | Samsung SSD 980 PRO 1TB | |
| リモコン | Logitech F710 | 同左 | |
| Wi-Fiルータ | ASUS RT-AX3000 コンテック FXE3000 | 同左 | |
| OS | Ubuntu 18.x / Ubuntu 20.x | ー | |
| Jetpack SDK (Docker) | 5.1.1 | ー | |
| ソフトウェア外部I/F | ROS2 (Foxy) | ー | |
| Webブラウザ | Google chrome | ー |
評価キット
「ZIA MOVE」をご評価いただくことを目的とした評価キットです。
お客様は、NVIDIA® Jetson AGX Orin開発キットと付属のRealSense RGBDカメラを用いて、ZIA MOVEをご評価いただくことが可能です。


