人生100年時代、共生時代を迎えた今日、電動車椅子などのパーソナルモビリティは、利用者のQOL(生活の質)を高め、自己実現を後押しする大きな可能性をもっています。今回、当社はWHILL(ウィル)株式会社が提供している次世代型電動車椅子の研究開発モデル「WHILL Model CR(以下:WHILL)」に、当社のロボティックビークル向け統合ソフトウエアプラットフォーム「ZIA MOVE」をインストールし、自律走行を実現しました。利用者の移動をサポートする電動車椅子の自動運転化は、運転者の操作ミスや確認不足などのヒューマンエラーや脇見運転による事故を防止し、安全性を高めることに寄与するものと考えています。
今回DMPで自律走行させたWHILLのシステム構成は図1の通りです。
WHILLに、RGBDカメラ(Intel RealSense Depth Camera D435i)、当社の「ZIA MOVE」をインストールしたNVIDIA社組込用途向けGPU(Jetson AGX Xavier Development Kit)、ポータブル電源などのハードウエアを搭載し、動作セットアップを行いました。
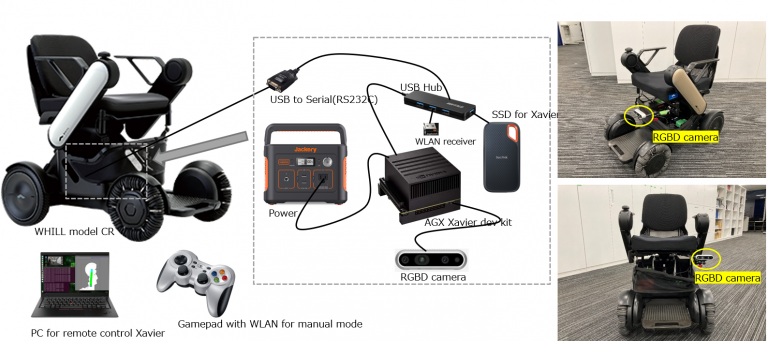
図2の通り、RGBDカメラが収集した画像と深度情報を用いて、ZIA MOVEに内包されたVisual SLAMソフトウエア「製品名:ZIA SLAM」が位置認識の上、Occupancy Grid Map(占有格子地図)を更新しながら、WHILLの自律走行を可能にしています。
自律走行実験は、屋内、屋外で行いました。
パーソナルモビリティの自律走行にあたって、屋内、屋外、まわりの風景など、その周囲環境は様々です。環境変化が大きい場合、自己位置を認識できなかったり、自己位置の精度自体が落ちたりすることがよくあります。DMPのZIA MOVE(ZIA SLAM)は、様々な環境下の実証実験を通じて、Visual SLAMソフトウエア(ZIA SLAM)並びにPath Planning(経路生成)ソフトウエアの安定した動作を確保するための改善・改良が施されており、屋内および屋外において安定した自律運転を実現することが可能です。
ZIA MOVEの評価キットは、操作用サンプルソースコード(ROS1対応)を提供していますので、お客様は、サンプルソースコードを修正することなく、そのままご使用いただければ、ZIA MOVEを用いたWHILLの自律走行を行うことが可能です。
WHILLなどのパーソナルモビリティの自律運転実現をお考えのお客様はZIA MOVEのご活用を是非ご検討ください。
As we have entered the age of 100-year life and coexistence, personal mobility vehicles such as electric wheelchairs have great potential to enhance the quality of life (QOL) of users and encourage self-fulfillment. This time, we have installed our integrated software platform for robotic vehicles, ZIA MOVE, on WHILL Model CR (WHILL), a next-generation electric wheelchair research and development model provided by WHILL Inc., to realize autonomous driving. We believe that the autonomous driving of electric wheelchairs, which support the mobility of users, will help prevent accidents caused by human error, such as operating error or lack of confirmation by the driver, and ones due to distracted driving, thereby contributing to increased safety.
Figure 1 shows the system configuration of WHILL, which was driven autonomously by DMP.
The WHILL is equipped with an RGBD camera (Intel RealSense Depth Camera D435i), NVIDIA’s GPU for embedded applications (Jetson AGX Xavier Development Kit) with our “ZIA MOVE” installed, portable power supply, and other hardware.
As shown in Figure 2, the Visual SLAM software (product name: ZIA SLAM) embedded in ZIA MOVE recognizes the location and updates the occupancy grid map using images and depth information collected by the RGBD camera to enable WHILL’s autonomous driving.
Autonomous driving tests were conducted indoors and outdoors.
When a personal mobility vehicle runs autonomously, its surrounding environment, such as indoors, outdoors, and the surrounding landscape, varies. DMP’s ZIA MOVE (ZIA SLAM) has been tested in a variety of environments, so the Visual SLAM software (ZIA SLAM) and Path Planning software have been improved greatly enough to enable stable autonomous driving indoors and outdoors.
The ZIA MOVE evaluation kit provides a sample source code (ROS1 compliant) for operation. Customers can use it with no modification to perform autonomous driving of WHILL using ZIA MOVE.
We would appreciate your consideration of using ZIA MOVE if you are considering or working on the realization of autonomous driving of WHILL and other personal mobility vehicles.


